
Unityですごろくを作ってみる2

はい、こんにちは〜。
今回は前回のすごろくに経路探索を組み込んで見ました。
やったことは
- ゴールまでのマスの数の表示
- 道が選択できるときに、近いほうの矢印を赤くしました。
サイコロの挙動が怪しいのは直してないです。(;w;)
どこがおかしいんだろな〜w
##参考書籍
ActionScript3.0にアニメーションというオライリーの書籍です。
ActionScript3.0用のソースをちょっとUnityようにいじって、すごろく用にアレンジしています。
経路探索についてはゲーム開発者のためのAI入門という本(こちらもオライリー)にも記載があります。
##今回の作成結果
すごろくのようなもの2
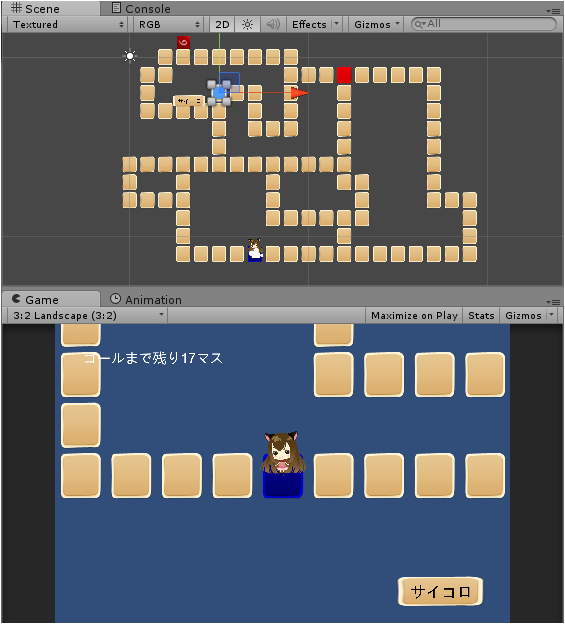
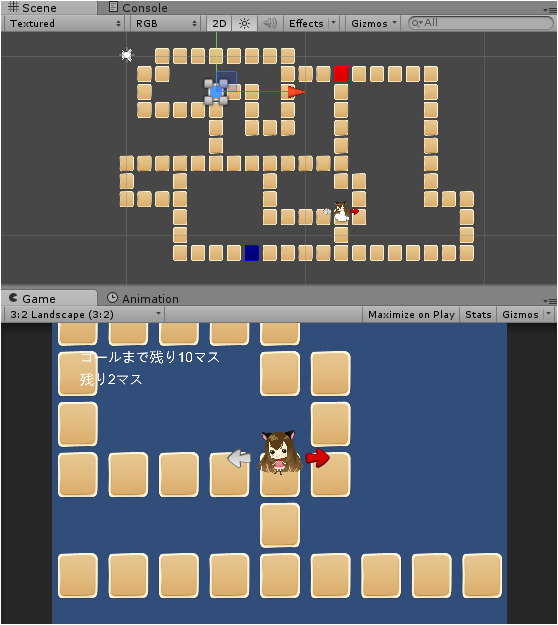
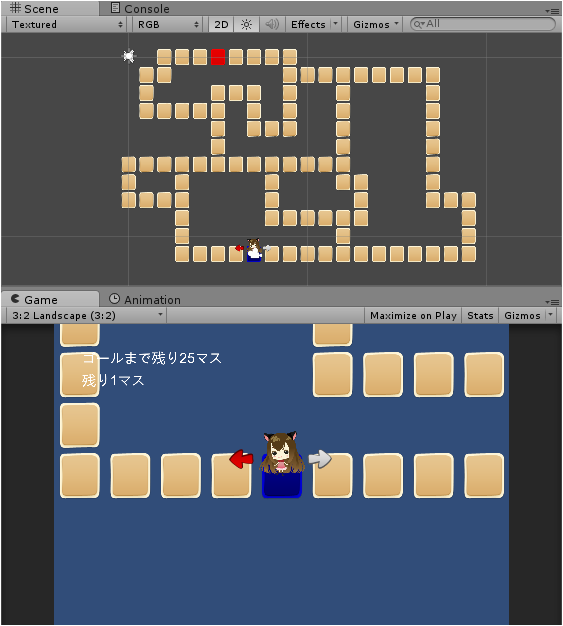
ゴールの場所を変更してもちゃんと計算されます。
##経路探索のクラス 追加した経路探索用のクラスです。
Node.js
一つの探索したノードの情報を格納するクラス
gがこのノードまでの距離、hがこのノードからゴールまでの予測の距離、fにgとhを足した値が入ります。
parentはこのノードの前のノード
walkableは移動できるかどうかです。
public class Node{
var x:int;
var y:int;
var f:float;
var g:float;
var h:float;
var walkable:boolean = true;
var parent:Node;
public function Node(x:int, y:int){
this.x = x;
this.y = y;
}
}
Grid.js
検索するタイルの情報を保持するクラス
public class Grid{
private var _startNode:Node;
private var _endNode:Node;
private var _nodes:Array;
private var _numCols:int;
private var _numRows:int;
public function Grid(numCols:int, numRows:int){
_numCols = numCols;
_numRows = numRows;
_nodes = new Array();
for(var x:int = 0; x < _numCols; x++){
for(var y:int = 0; y < _numRows; y++){
_nodes[x + y * _numCols] = new Node(x,y);
}
}
}
public function getNode(x:int, y:int):Node{
return _nodes[x + y * _numCols] as Node;
}
public function setEndNode(x:int, y:int):void{
_endNode = getNode(x,y) as Node;
}
public function setStartNode(x:int, y:int):void{
_startNode = getNode(x,y) as Node;
}
public function setWalkable(x:int, y:int, value:boolean):void{
getNode(x,y).walkable = value;
}
public function get endNode():Node{
return _endNode;
}
public function get numCols():int{
return _numCols;
}
public function get numRows():int{
return _numRows;
}
public function get startNode():Node{
return _startNode;
}
}
AStar.js
こちら実際に経路探索を行うクラス
_heuristicはhを計算する方法です。細かいことは割愛w
_pathにスタートからゴールまでのNodeのリストが格納されます
public class AStar{
private var _open:Array;
private var _closed:Array;
private var _grid:Grid;
private var _endNode:Node;
private var _startNode:Node;
private var _path:Array;
private var _straightCost:float = 1.0;
private var _diagCost:float = Mathf.Sqrt(2);
private var _heuristic:Function = manhattan; // マンハッタン法
// private var _heuristic:Function = euclidian; // ユークリッド法
// private var _heuristic:Function = diagonal; // 対角線法
private var _skewPathFlg:boolean; // 斜め移動許可
public function AStar(){
}
public function findPath(grid:Grid, skewFlg:boolean){
_grid = grid;
_skewPathFlg = skewFlg;
_open = new Array();
_closed = new Array();
_startNode = _grid.startNode;
_endNode = _grid.endNode;
_startNode.g = 0;
_startNode.h = _heuristic(_startNode);
_startNode.f = _startNode.g + _startNode.h;
return search();
}
public function search():boolean{
var node:Node = _startNode;
while(node != _endNode){
var startX:int = Mathf.Max(0, node.x -1);
var endX:int = Mathf.Min(_grid.numCols - 1, node.x + 1);
var startY:int = Mathf.Max(0, node.y - 1);
var endY:int = Mathf.Min(_grid.numRows - 1, node.y + 1);
for(var i:int = startX; i <= endX; i++){
for(var j:int = startY; j <= endY; j++){
var test:Node= _grid.getNode(i,j);
if(test == node || !test.walkable){
continue;
}
// 斜め移動禁止
if(!_skewPathFlg){
var dx:Number = node.x - test.x;
var dy:Number = node.y - test.y;
var num:float = Mathf.Sqrt(dx * dx + dy * dy) * _straightCost;
if(num > 1){
continue;
}
}
var cost:Number = _straightCost;
if(!((node.x == test.x) || (node.y == test.y))){
cost = _diagCost;
}
var g:float = node.g + cost;
var h:float = _heuristic(test);
var f:float = g + h;
if(isOpen(test) || isClosed(test)){
if(test.f > f){
test.f = f;
test.g = g;
test.h = h;
test.parent = node;
}
}else{
test.f = f;
test.g = g;
test.h = h;
test.parent = node;
_open.push(test);
}
}
}
_closed.push(node);
if(_open.length == 0){
Debug.Log("経路がないよ");
return false;
}
BubbleSort(_open);
node = _open.shift() as Node;
}
buildPath();
return true;
}
// ソート
private function BubbleSort(_nodeList:Array):Array{
for(var i:int = 0; i < _nodeList.length; i++){
for(var j:int = 0; j < _nodeList.length-1; j++) {
if(Sort(_nodeList[j], _nodeList[j+1])){
var tmp:Node = _nodeList[j+1];
_nodeList[j+1] = _nodeList[j];
_nodeList[j] = tmp;
}
}
}
return _nodeList;
}
private function Sort(node1:Node, node2:Node){
return node2.f - node1.f;
}
private function buildPath():void{
_path = new Array();
var node:Node = _endNode;
_path.push(node);
while(node != _startNode){
node = node.parent;
_path.unshift(node);
}
}
public function get path():Array{
return _path;
}
private function isOpen(node:Node):boolean{
for(var i:int = 0; i < _open.length; i++){
if(_open[i] == node){
return true;
}
}
return false;
}
private function isClosed(node:Node):boolean{
for(var i:int = 0; i < _closed.length; i++){
if(_closed[i] == node){
return true;
}
}
return false;
}
private function manhattan(node:Node):float{
return Mathf.Abs(node.x - _endNode.x) * _straightCost +
Mathf.Abs(node.y - _endNode.y) * _straightCost;
}
private function euclidian(node:Node):float{
var dx:Number = node.x - _endNode.x;
var dy:Number = node.y - _endNode.y;
return Mathf.Sqrt(dx * dx + dy * dy) * _straightCost;
}
private function diagonal(node:Node):Number{
var dx:int = Mathf.Abs(node.x - _endNode.x);
var dy:int = Mathf.Abs(node.y - _endNode.y);
var diag:int = Mathf.Min(dx, dy);
var straight:int = dx + dy;
return _diagCost * diag + _straightCost * (straight - 2 * diag);
}
public function get visited():Array{
return _closed.concat(_open);
}
}
##使い方
使い方はまずタイルの初期化部分でGridデータを作成します。
引数は横のタイルの数と、縦のタイルの数です。
grid = new Grid(masuColSize,masuRowSize);
次にマスのループ内で各マスが移動可能かをセットします
grid.setWalkable(x,y,false);
そして、スタート位置、ゴール位置をセットします
grid.setStartNode(x, y);
grid.setEndNode(x, y);
これで初期設定完了
実際に経路探索する場合はこんな感じ
var astar:AStar = new AStar();
if(astar.findPath(grid, false)){
astarPath = astar.path;
goalMoveText.GetComponent(TextMesh).text = "ゴールまで残り" + (astarPath.length-1) + "マス";
}else{
Debug.LogError("ゴールできません");
}
AStarクラスのfindPathメソッドを呼ぶ。
引数はGridデータと斜め移動を許可するかどうかのフラグです。
すごろくの場合は斜め移動はないので指定できるようにしました。
すると、astar.pathに、現在地点からゴールまでのNodeのリストが入っています。
次のマスを取得したい場合はastarPath[1];です。
最初に現在のノードが入っているので、ゴールまでのマスの数は-1するのを忘れずに。
これを移動するたびに行えばOK!
##今回の感想
前回のにそのまま経路探索組み込んだだけなのでかなりチープなすごろくですがまぁご愛嬌ということで。
経路探索を使えばマス目形のゲームで大助かりです。
たとえば
- 今回のようなゴールへのマス数、最短経路を表示するようなすごろく
- ダンジョンゲームで敵が追いかけてくる経路の計算
- あるいはマスに好きに配置できる形のタワーディフェンスで、おけるかどうかのチェックや、敵の経路の計算
ぱっと思いつくので3つ。
ソースを変更すれば六角形のマスとかも同じ考え型でいけるはず。
では今回はこの辺で^^